เป็นช่วงเวลาที่ยุ่งมากในสองสามเดือนที่ผ่านมานี้ ในเรื่องเกี่ยวกับ UAVs โครงการ GNSS ความแม่นยำสูง และ GIS ประกอบกับมีการประชุมเชิงปฏิบัติการต่างๆเข้ามาแทรกในช่วงนั้นด้วย เทคโนโลยี GNSS และ UAV ความแม่นยำสูงกำลังเป็นที่น่าสนใจอย่างมาก
UAVs: ที่ผลิตโดยผู้บริโภค (Prosumer) และการทำแผนที่บนทางลาดชัน
เห็นได้ชัดว่า UAVs สำหรับผู้ใช้งานทั่วไป (Consumer) ได้รับความสนใจอย่างมาก ในกลุ่มตลาดอุปกรณ์อิเล็กทรอนิกส์ห้าปีที่ผ่านมา ตั้งแต่สำนักงานบริหารการบินแห่งชาติ (FAA) เริ่มให้ UAVs ลงทะเบียนในปลายปี พ.ศ. 2558 ในปัจจุบัน UAVs กว่าเจ็ดแสนลำได้ทำลงทะเบียนกับ FAA แล้ว ซึ่งมีจำนวนมากกว่าอากาศยานที่มีคนขับถึงสามแสนสองหมื่นลำ
ในความเป็นจริง จำนวนที่อากาศยานไร้คนขับ UAVs ลงทะเบียนมีมากกว่าจำนวนการจดทะเบียนของอากาศยานที่มีคนขับมานานแล้ว (มากกว่าหนึ่งปีที่ผ่านมา) FAA รายงานว่า ณ จุดใดจุดหนึ่งในระหว่างวัน มีอากาศยานที่มีคนขับบินอยู่เหนือน่านฟ้าอเมริกาถึงเจ็ดพันลำ นั่นชวนให้เราสงสัยว่า มีอากาศยานไร้คนขับกี่ลำที่กำลังบินอยู่เหนือศีรษะเราตรงจุดที่เราอยู่ในเวลานั้น? ไม่มีใครตอบคำถามนี้ได้
อาศัยความช่วยเหลือจากผู้บริโภค หลักๆของ UAVs ที่ใช้ในสหรัฐอเมริกาเป็นการใช้ในโลกการค้าเสียมากกว่า ตั้งแต่เดือน สิงหาคม พ.ศ. 2559 FAA อนุญาตให้ใครก็ตามสามารถบิน UAVs เพื่อธุรกิจได้ ($150 และตอบ 42 ข้อได้ถูกต้องจาก 60 คำถาม) บริษัทจำนวนมากมายกำลังซื้อ UAVs ที่ “ผู้บริโภคผลิตเอง” และใช้ประโยชน์มากมายจากพวกมัน
อุปกรณ์อิเล็กทรอนิกส์ที่ผู้บริโภคผลิตขึ้นเองเป็นอุปกรณ์และซอฟต์แวร์ที่มีเป้าหมายอยู่ที่ตลาดผู้บริโภคและยังมีคุณภาพมากพอที่จะนำมาใช้ในธุรกิจ ตลาดอากาศยานไร้คนขับคือตัวอย่างที่ดีที่สุดในเรื่องนี้ DJI เป็นบริษัทผู้ผลิตอากาศยานไร้คนขับที่ใหญ่ที่สุดในโลก รายได้อยู่กว่าหนึ่งพันล้านเหรียญสหรัฐต่อปี เป้าหมายอยู่ที่ตลาดผู้บริโภคเป็นหลักและขายอากาศยานไร้คนขับประสิทธิภาพระดับล่าง กลาง และ ระดับสูง ให้กับธุรกิจต่างๆ เป็นจำนวนมาก ลองคิดดูซิ คุณสามารถซื้อ DJI Phantom 4 Pro ได้ที่ร้าน Apple Store และ ในวันต่อมาสามารถสร้างแผนที่ชั้นความสูง (Elevation contours) สำหรับไซต์งานได้
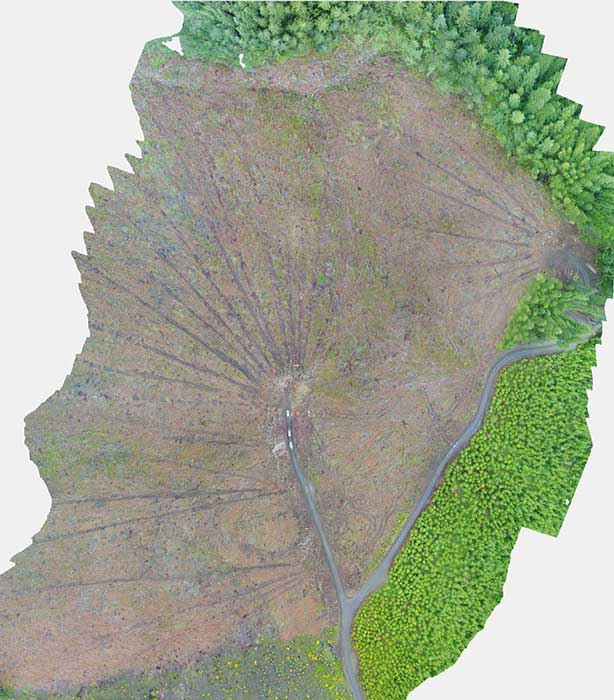
ต่อมาคือตัวอย่างของโรงงานกระดาษที่ผมได้บินมาเมื่อสองสามสัปดาห์ที่ผ่านมา ผมบินน้อยกว่าหนึ่งชั่วโมง (ได้พื้นที่ 50 acres) ทำให้ได้ภาพออร์โทที่ความละเอียด 2.4 cm/pixel และแบบจำลองความสูงเชิงเลข (DEM) ที่ความละเอียด 4.79 cm/pixel
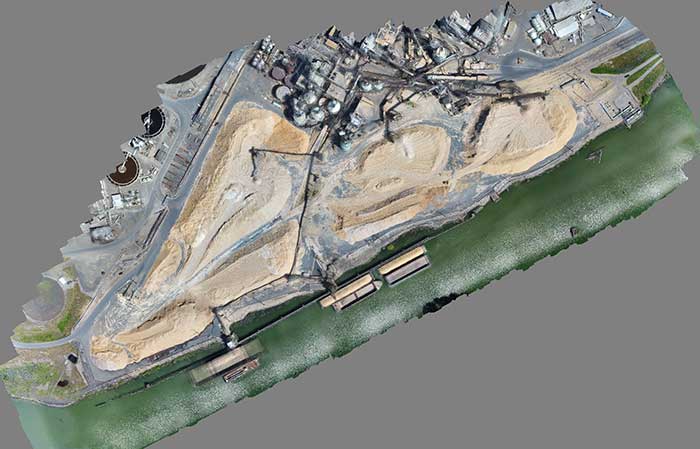 รูปภาพที่ 1 แสดงให้เห็นถึงภาพออร์โทที่ความละเอียด 2.4 cm/pixel กับพื้นที่ 50 acres
รูปภาพที่ 1 แสดงให้เห็นถึงภาพออร์โทที่ความละเอียด 2.4 cm/pixel กับพื้นที่ 50 acres
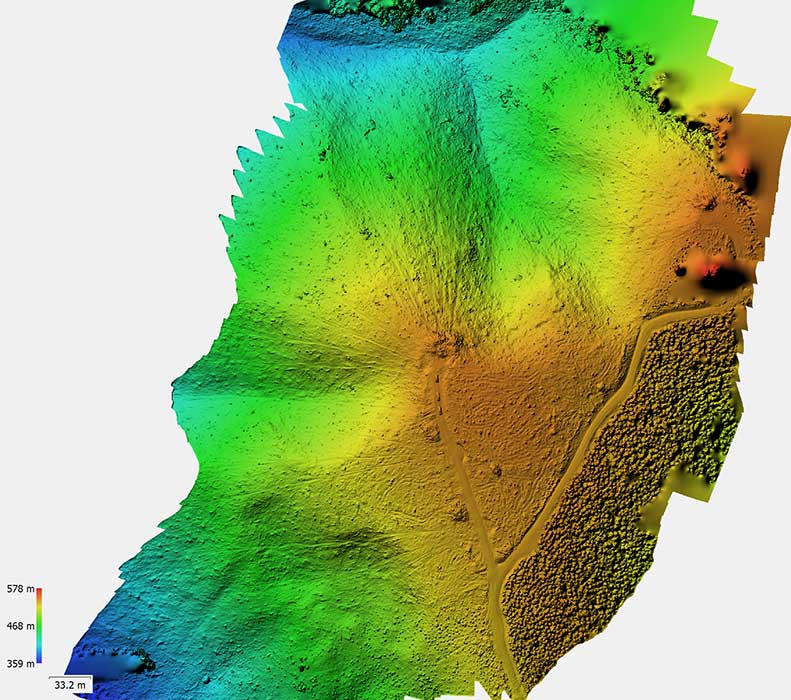
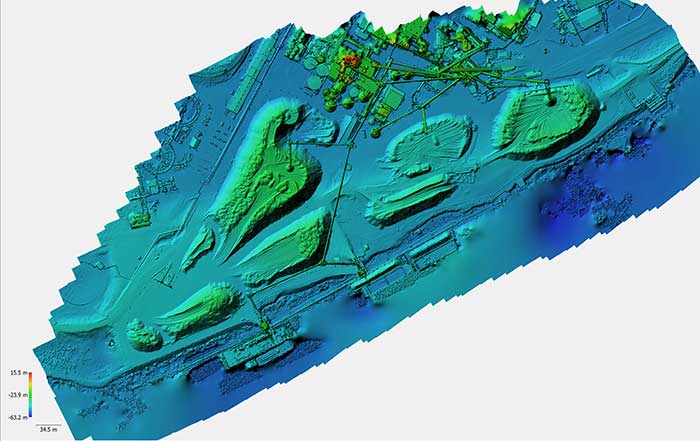 รูปภาพที่ 2 แบบจำลองความสูงเชิงเลขที่ความละเอียด 4.79-Cm/pixel ในการบินเดียวกัน
รูปภาพที่ 2 แบบจำลองความสูงเชิงเลขที่ความละเอียด 4.79-Cm/pixel ในการบินเดียวกัน
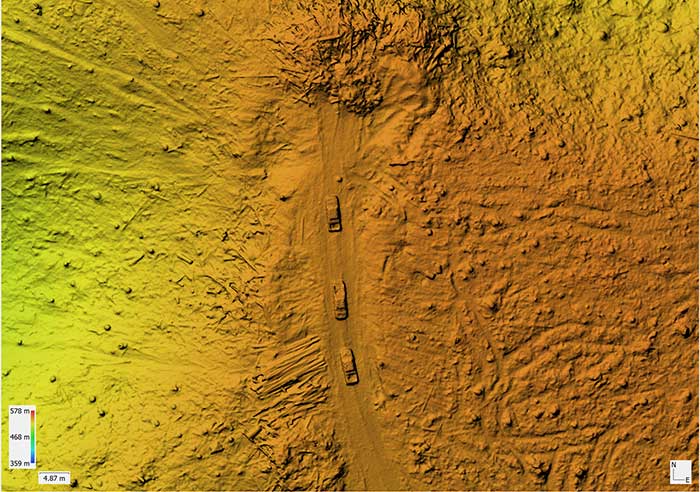
 รูปภาพที่ 3 ภาพซูมใกล้แบบจำลองความสูงเชิงเลข (DEM) เดียวกัน
รูปภาพที่ 3 ภาพซูมใกล้แบบจำลองความสูงเชิงเลข (DEM) เดียวกัน
ฐานข้อมูลรายละเอียดข้างต้น ผลิตขึ้นจากอากาศยานไร้คนขับในระดับราคา $1,500 ที่ให้ความชัดเจนอย่างมาก อย่างไรก็ดี จุดประสงค์ของโครงการใช้เพื่อกำหนดปริมาณของคลังสินค้าจำนวนมาก ซึ่งผมยังไม่ได้คำนวณออกมา แต่หากปริมาณที่คำนวณได้ใกล้เคียงกับวิธีการที่ใช้วัดที่อยู่บนพื้นดินแบบเดิม ผลตอบแทนการลงทุน (ROI) กับอากาศยานไร้คนขับก็ยากที่จะโต้แย้งได้
เพื่อทำการวัดคลังสินค้าทั้งหมดในเขตไซต์งานด้วยการใช้เครื่องมือวัดพื้นดินแบบเดิมใช้เวลา14 ชั่วโมงในแต่ละเดือน อีกทั้ง การวัดต้องทำการในวันสุดสัปดาห์เมื่อกิจกรรมของไซต์มีน้อย เปรียบเทียบกับใช้เวลาบินไม่ถึงหนึ่งชั่วโมงเพื่อครอบคลุมไซต์งานทั้งหมด และผมได้ทำการบินสองครั้ง (ครั้งที่ 1 ทิศตะวันตกไปทิศตะวันออก ซ้อนทับกัน 80/80 และ ครั้งที่ 2 ทิศเหนือไปทิศใต้ ซ้อนทับกัน 70/70) เพื่อทำให้แน่ใจว่ามีฐานข้อมูลเพียงพอ ผมใช้เวลาขับรถ 1.5 ชั่วโมงไปยังไซต์งาน ทำไมถึงจะไม่ใช้เวลาอีก 20 นาที เพื่อบินมันไปในทิศทางตั้งฉาก?
ณ ช่วงเวลานั้น ผมเพิ่งบินเฉพาะบนพื้นที่ราบ เช่น ไซต์งานก่อสร้าง พื้นที่เกษตร และไซต์งานอุตสาหกรรม จนกระทั่งสองสัปดาห์ที่แล้ว ในขณะที่รู้สึกคุ้นชินขึ้นบ้างกับการบินในที่กว้างและพื้นที่ราบมากกว่า 18 เดือนที่ผ่านมา ผมไม่กล้าบินเข้าไปในไซต์งานที่มีการเปลี่ยนแปลงระดับความสูงมากและมีเรือนยอดไม้ (tree canopy) ในที่สุดผมทำได้เมื่อต้นเดือนนี้ และมันเป็นทั้งความท้าทายและภูมิใจ มีปัญหาสองสามประการสำหรับไซต์งานที่มาพร้อมกับการเปลี่ยนแปลงระดับความสูงมากและมีเรือนยอดไม้ (tree canopy)
-
คงระดับไว้ที่สายตามองเห็น (VLSO) ตามที่ FAA กำหนด
-
บินในวิธีการซึ่งซอฟต์แวร์ประมวลผลภาพมีฐานข้อมูลที่ดีและมีคุณภาพที่จะทำงานได้ เพื่อให้คุณสามารถสร้างผลิตภัณฑ์ที่คุณต้องการได้
การวางแผนภารกิจ/การควบคุม ซอฟต์แวร์แสดงบทบาทสำคัญในกระบวนการนี้ โดยปกติแล้ว ภารกิจการวางแผน/การควบคุม มันต้องการให้คุณบินในความสูงที่สม่ำเสมอเหนือพื้นดินดังนั้นการซ้อนทับกันของคุณจึงสอดคล้องกัน เรื่องนี้เป็นเรื่องที่ยากกับการทำให้สำเร็จหากคุณกำลังบินในไซต์งานที่มีการเปลี่ยนแปลงระดับความสูง ในกรณีนั้น พวกเขามักจะบอกคุณให้ปล่อยจากจุดที่สูงที่สุด (หรือใกล้กับจุดที่สูงที่สุด) และบินในระดับความสูงนั้น
ปัญหานี้เป็นสาเหตุที่ว่าคุณสามารถจบการบินที่ 500, 600 หรือ 700 ฟุตเหนือระดับพื้นดิน (AGL: Above Ground Level) ยกตัวอย่าง หากคุณกำลังบินบนไซต์งานด้วยความสูงที่เปลี่ยนแปลง 500 ฟุต และคุณสั่งแผน/ควบคุม ภารกิจด้วยซอฟต์แวร์ให้บินที่ 350 ฟุต AGL บางจุดในโครงการ UAV จะอยู่ที่ 850 ฟุต AGL นั่นจะเป็นปัญหาทั้งจากมุมมองด้านกฎระเบียบและมุมมองการประมวลผลภาพ (FAA ยอมให้ UAV บินสูงได้ถึง 400 ฟุต AGL)
โชคดีที่ ซอฟต์แวร์ภารกิจการวางแผน/การควบคุมที่ผมใช้เพียงแค่เพิ่มคุณลักษณะการคำนึงถึงลักษณะภูมิประเทศ Terrain Awareness มันใช้ฐานข้อมูล SRTM (ภารกิจเรดาร์รับส่งภูมิประเทศ)
โชคดีที่ว่า ซอฟต์แวร์ภารกิจการวางแผน/การควบคุมที่ผมใช้เพียงแค่สั่งคุณลักษณะการคำนึงถึงลักษณะภูมิประเทศ มันใช้ฐานข้อมูลระดับความสูง SRTM (Shuttle Radar Topography Mission) ได้รับข้อมูลความสูงของจุดภาพ (pixel) 30 เมตร ดังนั้นแต่ละบล็อคความสูงจะอยู่ที่ 30 x 30 เมตร ผมสงสัยว่าความละเอียดนี้สูงพอหรือไม่ ไซต์งานที่ผมกำลังจะบินไปมีขนาดพื้นที่เพียง 60 acres เท่านั้นและมีความสูงที่เปลี่ยนแปลง 550 ฟุต ต้นไม้ในพื้นที่ได้รับการเก็บเกี่ยวไปแล้ว ดังนั้นผืนดินจึงค่อนข้างเห็นได้ชัดเจน มีแค่ประมาณ 550 ฟุตที่แตกต่างไปจากจุดเริ่มต้นที่คาดการณ์ไว้ (จุดสีม่วง) ไปทางเหนือและมาจบทางตะวันตกของไซต์งาน ต่อไปนี้เป็นภารกิจที่วางแผนไว้สำหรับไซต์งานที่ผมจะบิน
 รูปภาพที่ 4 แสดงให้เห็นไซต์งานขนาด 60 acre พร้อมกับความสูงที่เปลี่ยนแปลง 550 ฟุต
รูปภาพที่ 4 แสดงให้เห็นไซต์งานขนาด 60 acre พร้อมกับความสูงที่เปลี่ยนแปลง 550 ฟุต
เพื่อให้คุณเข้าใจเกี่ยวกับทางลาดชัน เส้นทึบสีแดงในภาพต่อไปเป็นแนวเส้นชั้นความสูงที่ 100 ฟุต และสามเหลี่ยมสีเขียวเป็นจุดที่คาดว่าจะปล่อย UAV จุดนี้เป็นจุดปล่อยที่ดีมากเพราะสามารถเห็นพื้นที่ทั้งหมดและคงระดับไว้ที่สายตามองเห็น
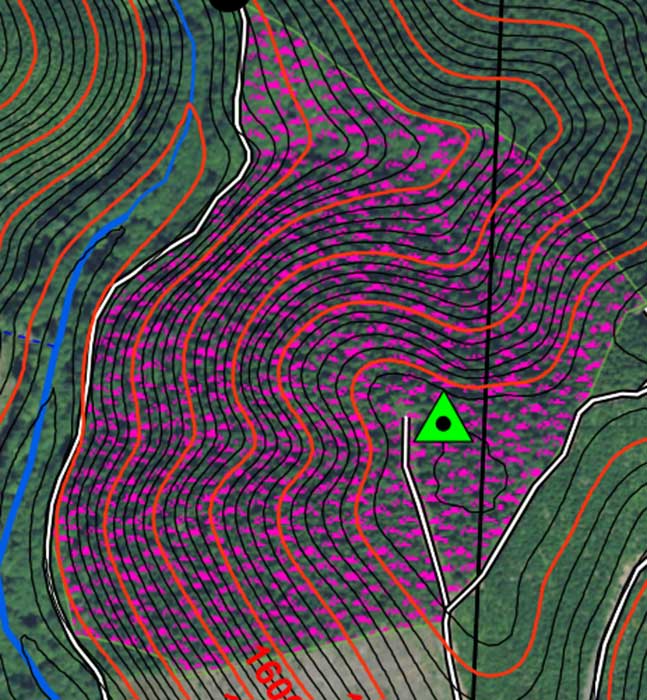 รูปภาพที่ 5 แสดงถึงไซต์งาน จุดที่คาดว่าจะปล่อย UAV
รูปภาพที่ 5 แสดงถึงไซต์งาน จุดที่คาดว่าจะปล่อย UAV
ผมเลือกที่จะบินในภารกิจที่ 300 ฟุต AGL ผมคิดว่ามันน่าจะสูงพอหากมี “ทางลาดชัน (Slope)” อยู่บ้างในแบบจำลองความสูง SRTM อย่างไรก็ตามผมกังวลเกี่ยวกับความละเอียดของข้อมูล SRTM เพราะว่าที่ความสูง 300 ฟุต AGL อากาศยานไร้คนขับของผมจะต้องบินต่ำกว่าระดับความสูงที่จุดเริ่มต้น เนื่องจากไซต์งานมีระดับความสูงที่เปลี่ยนแปลงมาก ควรจะระลึกไว้ว่า คุณลักษณะการคำนึงถึงความสูงในภารกิจ ซอฟต์แวร์การวางแผน/การควบคุม จะขึ้นกับข้อมูลความสูง SRTM และไม่ได้ขึ้นกับเซนเซอร์ใดๆ สำหรับอากาศยานไร้คนขับ หากฐานข้อมูลความสูง SRTM ไม่ถูกต้อง อากาศยานไร้คนขับของผมอาจจะตกลงสู่พื้น
ต่อไปนี้คือข้อมูลความสูง SRTM พร้อมกับข้อมูลเส้นทางบินที่แสดงในซอฟต์แวร์การวางแผน/การควบคุม
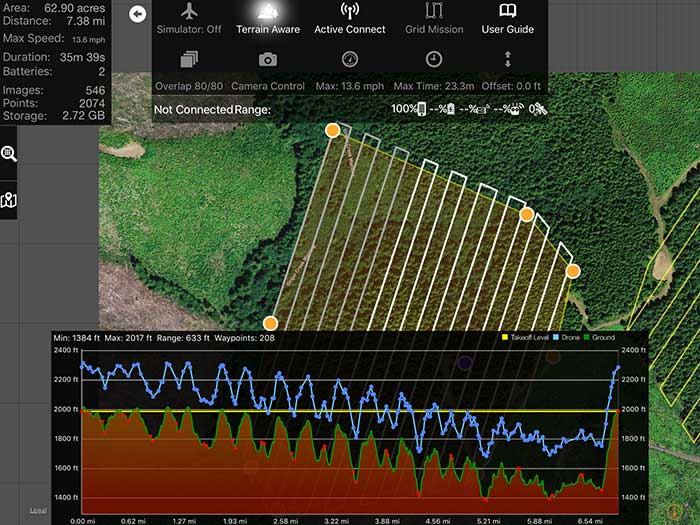 รูปภาพที่ 6 แสดงให้เห็นเส้นทางบินอากาศยานไร้คนขับที่อยู่บนพื้นฐานของข้อมูลความสูง SRTM
รูปภาพที่ 6 แสดงให้เห็นเส้นทางบินอากาศยานไร้คนขับที่อยู่บนพื้นฐานของข้อมูลความสูง SRTM
ช่วงเวลาแห่งความจริงก็มาถึงในขณะที่ผมปล่อยอากาศยานไร้คนขับจากจุดเริ่มต้น (จุดสีม่วง) และเฝ้าดูมันขึ้นไปที่ 300 ฟุต AGL เพื่อเริ่มต้นภารกิจ สองสามแนวแรกไม่มีเหตุการณ์ใดๆ หลังจากนั้น มันก็เริ่มบินเข้าไปที่หุบเขา ตามความสูงที่ได้ทำโปรแกรมไว้ แล้วบินสูงขึ้นจากหุบเขาในระหว่างที่ผ่านไปแต่ละแห่ง มันเป็นสิ่งที่สวยงามกับการเฝ้าดู
โชคไม่ดี ประมาณ 70 เปอร์เซ็นต์ของการบินผ่านภารกิจ ฝนเริ่มตก ดังนั้นเราจึงสั่งยกเลิก อย่างไรก็ตาม เราได้พิสูจน์แล้วว่าอย่างน้อยสี่ไซต์งานที่ผมบินในวันนั้น ข้อมูล SRTM และคุณลักษณะการให้ความรู้เกี่ยวกับภูมิประเทศมีประสิทธิภาพในการรวบรวมข้อมูลในสภาพแวดล้อมที่ลาดชัน ต่อไปนี้คือภาพออร์โทขนาด 2.69 cm/pixel ที่ผลิตขึ้นจากการบิน
 รูปภาพที่ 7 ภาพออร์โทขนาด 2.69 cm/pixel
รูปภาพที่ 7 ภาพออร์โทขนาด 2.69 cm/pixel
ภาพต่อไป เป็นภาพขยาย ณ จุดปล่อยอากาศยานไร้คนขับ
 รูปภาพที่ 8 ภาพขยายของภาพออร์โท
รูปภาพที่ 8 ภาพขยายของภาพออร์โท
และ ภาพแบบจำลองความสูงเชิงเลข 5.37 cm/pixel ที่สร้างจากข้อมูลการบิน
 รูปภาพที่ 9 ภาพขยายขนาด5.37 cm/pixel ของแบบจำลองความสูงเชิงเลข
รูปภาพที่ 9 ภาพขยายขนาด5.37 cm/pixel ของแบบจำลองความสูงเชิงเลข
ภาพขยายแบบจำลองความสูงเชิงเลข 5.37 cm/pixel
 รูปภาพที่ 10 ภาพขยายขนาด 5.37 cm จากแบบจำลองความสูงเชิงเลข ณ จุดปล่อยอากาศยานไร้คนขับ
รูปภาพที่ 10 ภาพขยายขนาด 5.37 cm จากแบบจำลองความสูงเชิงเลข ณ จุดปล่อยอากาศยานไร้คนขับ
ภารกิจประสบผลสำเร็จ ในการพิสูจน์ว่าข้อมูลความสูง SRTM เพียงพอที่จะบินภารกิจ AGL ที่มีความเปลี่ยนแปลง (Dynamic AGL) มันสามารถรับมือกับแนวลาดชันได้ ด้วยการรักษาระดับความสูงแบบ AGL อย่างเหมาะสมดังที่ผมหวังไว้ แม้ว่าบล็อคความสูงจะมีความละเอียดที่ 30 x 30 เมตรเท่านั้น ซอฟต์แวร์ประมวลผลภาพจะดูเหมือนข้อมูลจากอากาศยานไร้คนขับ ตามที่คุณมองเห็นผลลัพธ์จากด้านบน ผมไม่ได้ใช้เวลาดำเนินการใด ๆ เพิ่มเติมนอกเหนือจากสิ่งที่ผมมักใช้เพื่อสร้างผลิตภัณฑ์เหล่านี้
ผมมีอาการสะอึกกับภารกิจใช้ซอฟต์แวร์ การทำแผน/ควบคุม ที่ใช้กับ iPad Mini2 มันกลับกลายว่าคุณลักษณะการรับรู้ข้อมูลภูมิประเทศของการวางแผน/ควบคุม ต้องใช้ CPU เพิ่มขึ้น – ซอฟต์แวร์กินทรัพยากรมากจนทำให้ iPad Mini2 ของผมใช้การไม่ได้ไปครั้งหนึ่งในระหว่างภารกิจ อากาศยานไร้คนขับยังคงบินต่อไปในทิศทางที่กำหนดไว้ต่อไป แต่มันหยุดการถ่ายภาพในขณะที่ซอฟต์แวร์หยุดการทำงาน ดังนั้นผมจึงนำมันกลับไปยังจุดปล่อยอีกครั้ง
หลังจากเข้าไปที่เว็บไซต์ของผู้ขายซอฟต์แวร์ผมก็เห็นว่าอาจจะถึงเวลาต้องอัพเกรด iPad Mini2 ของผมไปยังรุ่นล่าสุดเพื่อจะได้รองรับกับคุณลักษณะใหม่ๆที่กำลังนำเข้ามาใช้ในซอฟต์แวร์
บันทึกย่อเกี่ยวกับ GNSS ความแม่นยำสูง
เมื่อเดือนมีนาคม ผมได้เข้าร่วมประชุม Hawaii GIS และได้ตัดสินใจที่จะปฏิบัติการทดสอบในแบบสำรวจตามเกณฑ์มาตรฐานบางอย่างด้วยการใช้ระบบปรับแก้ WAAS และเครื่องรับ GNSS ที่มีความแม่นยำสูง
เป้าหมายของผมมีสองขั้น
-
ให้ดูว่า WAAS มีพฤติกรรมใน Hawaii อย่างไร ระบบ WASS ใน Hawaii มีความผิดปกติเพราะว่ามันห่างไกลจากแผ่นดินใหญ่สหรัฐอเมริกา (CONUS) ที่ตั้งสถานีอ้างอิง WAAS อยู่ทั้งหมด (มีแค่เพียงสถานีเดียวใน Honolulu) พูดอีกนัยหนึ่งก็คือ Hawaii เป็นสถานที่ท้าทายสำหรับความแม่นยำในระบบ WAAS ในอเมริกาเหนือ
-
ให้ดูว่ามีดาวเทียม GNSS กี่ดวงที่ผมสามารถติดตามและใช้ใน Hawaii
คุณพระช่วย! ผมประหลาดใจที่ผลออกมาดีเกินคาด ผมได้ทดสอบระบบ WAAS ใน Hawaii หลายครั้ง\ในหลายปีที่ผ่านมา ครั้งสุดท้ายที่ผมทดสอบคือปี พ.ศ. 2556 และระบบรับสัญญาณ GNSS ใช้ (GPS + GLONASS) ประสบผลสำเร็จอย่างดียิ่ง ที่ความแม่นยำ 80 cm ใช้ได้ดีทีเดียวสำหรับระบบ WAAS ใน Hawaii ณ ขณะนั้น
ผมนำเครื่องรับสัญญาณขึ้นเนินไป 4 ไมล์ หรือ 6.43 กิโลเมตร เพื่อหาเครื่องหมายสำหรับงานสำรวจ (หมุดอ้างอิง) ที่ผมสามารถหาได้ใน Honolulu ผมเป็นนักสำรวจเครื่องหมายที่ดีคนหนึ่งสำหรับการทดสอบเพราะว่ามันอยู่บนทางเท้าย่านถนนที่อยู่อาศัยอันเงียบสงบ ต่อไปนี้คือรูปภาพของเครื่องหมายสำหรับงานสำรวจ
 รูปภาพที่ 11 PID DK4162 เครื่องหมายสำหรับงานสำรวจใน Honolulu
รูปภาพที่ 11 PID DK4162 เครื่องหมายสำหรับงานสำรวจใน Honolulu
ผมได้ติดตั้งอุปกรณ์บนเครื่องหมายสำหรับงานสำรวจ และ มองไปที่ดาวเทียมซึ่งเครื่องรับสัญญาณกำลังติดตามอยู่ ผมต้องการที่จะรู้ว่ามีดาวเทียม GPS, GLONASS, Galileo และ BeiDou กี่ดวงที่กำลังใช้อยู่ และนี่คือภาพหน้าจอที่ได้
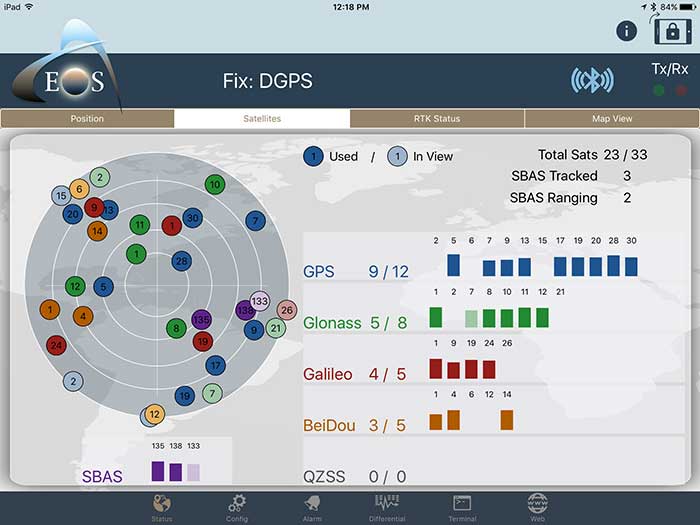 รูปภาพที่ 12 ดาวเทียมทั้งหมด 23 ดวงที่ใช้ระบบ GNSS
รูปภาพที่ 12 ดาวเทียมทั้งหมด 23 ดวงที่ใช้ระบบ GNSS
ดาวเทียม 23 ดวงใช้ระบบ GNSS คุณล้อเล่นผมหรือเปล่า? นี่เป็นจำนวนสองเท่ามากกว่าที่ใช้ดาวเทียม GPS เสียอีก แสดงให้เห็นถึงพลังของระบบ GNSS สี่กลุ่มที่จะดำเนินต่อไปได้ดีกว่าในอีกหลายปีข้างหน้า
สิ่งที่ทำให้ผมประหลาดใจมากที่สุดก็คือจำนวนดาวเทียม Galileo ที่ใช้อยู่ และนี่ก็คือก่อนที่ดาวเทียม Galileo สองดวงที่ได้ประกาศว่ายังคงใช้งานได้ดีอยู่ในตอนปลายเดือน พฤษภาคม
การทดสอบต่อไปของผมก็คือประเมินผลความแม่นยำระบบ WAAS ใครสนใจว่ามีดาวเทียมกี่ดวงที่กำลังใช้ภาครับอยู่หากความแม่นยำไม่ได้ดีขึ้น ? ผมตั้งเสาอากาศภาครับให้ตรงบนจุดสำรวจและเก็บข้อมูลเป็นเวลาประมาณ 7 นาที
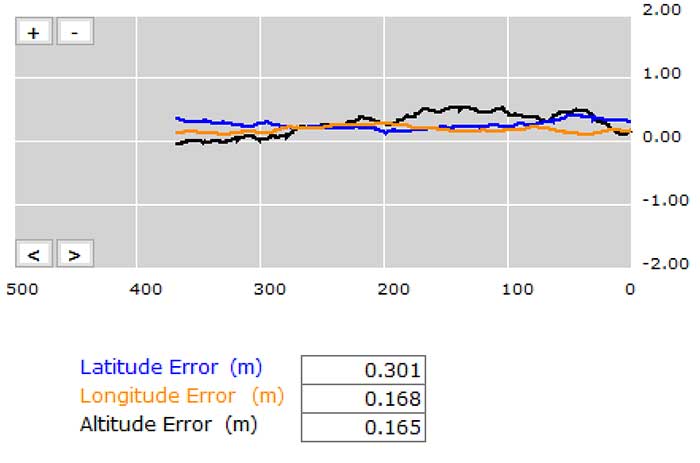 รูปภาพที่ 13 ความแม่นยำที่วางแผนไว้เปรียบเทียบกับพิกัดเครื่องหมายสำรวจ DK4162
รูปภาพที่ 13 ความแม่นยำที่วางแผนไว้เปรียบเทียบกับพิกัดเครื่องหมายสำรวจ DK4162
อืม ความแม่นยำประมาณ 30 cm ในช่วงเวลากว่า 7 นาที ซึ่งดีกว่าเมื่อเปรียบเทียบกับความแม่นยำที่ได้เห็นในปี พ.ศ. 2556 แน่ใจว่าระบบ WAAS ได้รับการปรับปรุงบ้าง และชั้นบรรยากาศรอบโลกอาจจะดีในวันนั้น แต่ผมต้องเชื่อว่าการเพิ่มดาวเทียม GNSS ช่วยให้เกิดความแม่นยำมากที่สุด อีกสองสามเดือนข้างหน้า ผมจะทดสอบเพิ่มเติมกับ WAAS และ RTK ในหลักสูตรทดสอบ GNSS ใกล้กับที่ทำงานของผม ผมจะแจ้งให้คุณทราบเกี่ยวกับผลการทดสอบเหล่านั้น
การประชุมของผู้ใช้ ESRI International วันที่ 10-14 กรกฎาคม
ตามปกติ ผมจะเข้าร่วมประชุม GIS ที่มีบรรดาผู้เชี่ยวชาญเข้าร่วมเป็นจำนวนมากในสหรัฐอเมริกาในเดือนหน้า การประชุมผู้ใช้ ESRI International จำนวน 16,000 คนจะหลั่งไหลมาที่ San Diego เพื่อแบ่งปันความรู้ สร้างเครือข่าย และสนุกไปกับการแลกเปลี่ยนข้อมูลต่าง ๆ ซึ่งกันและกัน
หากคุณสนใจ ผมจะนำเสนองานดังนี้ The ESRI UC:
-
วันอังคารที่ 11 กรกฎาคม เวลา08.30 น. ห้อง 28B (หมายกำหนดการอาจมีการเปลี่ยนแปลงได้) – ชื่อหัวข้อ: An Efficient, Accuracy Mobile GIS Workflow using RTK GNSS – วาระการประชุม: Mobile Data Collection – นี่เป็นโครงการที่น่าสนใจที่ผมได้ทำงานมากับ WaterOne อรรถประโยชน์ด้านน้ำขนาดใหญ่ เพื่อออกแบบ GNSS workflow แบบเวลาจริงที่มีความแม่นยำสูงในสภาพแวดล้อมของ ESRI พวกเขากำลังรวบรวมข้อมูลในระดับเซนติเมตรเพื่อทำแผนที่สินทรัพย์บนพื้นดินและการก่อสร้างใหม่โดยใช้คอมพิวเตอร์แท็บเล็ตและเครื่องรับ RTK GNSS
-
วันที่พฤหัสฯที่ 13 กรกฎาคม เวลา 08.30 น. ห้อง 29C(หมายกำหนดการอาจมีการเปลี่ยนแปลงได้) – ชื่อหัวข้อ:
UAV (drone) applications for water utilities – วาระการประชุม: Applied GIS: Three Unique Examples – นี่เป็นงานที่ผมได้ทำกับ American Water ในการใช้เทคโนโลยี UAV สำหรับทำแผนที่และตรวจสอบ เราได้ทำการทดลองหลายครั้ง ในระหว่างขั้นตอนการพิสูจน์แนวคิด เพื่อทราบว่า Applications สามารถทำงานได้ในทางปฏิบัติหรือไม่และอันไหนทำงานไม่ได้
ที่มาบทความ : Eric Gakstatter, geospatial-solutions.com บันทึก : เมื่อวันที่ 22 มิถุนายน 2560
สืบค้นจาก : http://geospatial-solutions.com/uavs-high-accuracy-gnss-red-hot-right-now-tech/