ค่าคลาดเคลื่อนที่เกี่ยวข้องกับเครื่องรับสัญญาณดาวเทียม
ค่าคลาดเคลื่อนที่ถูกจัดในกลุ่มนี้จะมีค่าคลาดเคลื่อนจากวงโคจรดาวเทียมและค่าคลาดเคลื่อนจากนาฬิกาดาวเทียม มีรายละเอียดดังนี้
- ค่าคลาดเคลื่อนจากวงโคจรดาวเทียม
ข้อมูลวงโคจรดาวเทียมนั้นถูกคำนวณขึ้นที่สถานีควบคุมหลัก โดยอาศัยข้อมูลที่รับได้จากสถานีติดตามดาวเทียมที่กระจายตัวอยู่ ซึ่งจะมีการทำนายวงโคจรดาวเทียมล่วงหน้าและส่งข้อมูลที่ทำนายไปยังตัวดาวเทียมเพื่อให้ดาวเทียมส่งมาให้กับผู้ใช้ในรูปแบบของข้อมูลนำหนที่มาพร้อมกับคลื่นสัญญาณดาวเทียม ในความเป็นจริงแล้วการทำนายวงโคจรของดาวเทียมให้สมบูรณ์นั้นเป็นไปไม่ได้ เนื่องจากมีแรงต่างๆ มากระทำกับตัวดาวเทียมมากมายหลายชนิด ด้วยเหตุนี้ตำแหน่งของดาวเทียมที่คำนวณได้จากข้อมูลวงโคจรดาวเทียมจึงยังมีค่าคลาดเคลื่อนอยู่
- ค่าคลาดเคลื่อนจากนาฬิกาดาวเทียม
ค่าคลาดเคลื่อนจากนาฬิกาดาวเทียมเกิดจากการเทียบเวลา และความถี่มาตรฐานที่แตกต่างไปจากเวลาจีพีเอส นอกจากค่าความคลาดเคลื่อนของนาฬิกาดาวเทียม (Clock error) แล้ว ยังมีความคลาดเคลื่อนระยะยาวที่เกิดจากความไม่สเถียรของมาตรฐานความถี่ที่เรียกว่า ดริฟท์ของนาฬิกา (Clock drift) และอัตราดริฟท์ของนาฬิกา (Clock drift rate) อีกด้วย โดยข้อมูลค่าความคลาดเคลื่อนของนาฬิกาดาวเทียมแต่ละดวงจะอยู่ในข้อมูลนำหนที่ส่งลงมาพร้อมกับคลื่นสัญญาณดาวเทียมในรูปแบบของสัมประสิทธิ์ค่าแก้นาฬิกาดาวเทียมทั้งสามตัว เช่นเดียวกับค่าคลาดเคลื่อนจากวงโคจรดาวเทียม ค่าความคลาดเคลื่อนของนาฬิกาดาวเทียมแต่ละดวงเป็นค่าที่ได้จากการคำนวณล่วงหน้าจากสถานีควบคุมหลัก
ค่าคลาดเคลื่อนที่เกี่ยวข้องกับเครื่องรับสัญญาณดาวเทียม
ค่าคลาดเคลื่อนที่ถูกจัดในกลุ่มนี้จะมีค่าคลาดเคลื่อนจากนาฬิกาเครื่องรับ (Receiver clock error) ค่าคลาดเคลื่อนจากการแปรเปลี่ยนของจุดศูนย์กลางเฟสของเสาอากาศ (Antenna phase center variation error) ค่าคลาดเคลื่อนจากสัญญาณรบกวนในเครื่องรับ (Receiver noise error) และค่าคลาดเคลื่อนจากค่าพิกัดของสถานีฐาน (Base station’s coordinate error)
- ค่าคลาดเคลื่อนจากนาฬิกาเครื่องรับ
เนื่องจากความเสถียรของระบบนาฬิกาที่ใช้ในเครื่องรับนั้นมีเสถียรภาพต่ำกว่านาฬิกาที่ใช้ในดาวเทียมมาก จึงมีผลทำให้นาฬิกาของเครื่องรับผิดไปจากเวลาจีพีเอสค่อนข้างมากเมื่อเทียบกับค่าคลาดเคลื่อนจากนาฬิกาดาวเทียม ขนาดของค่าคลาดเคลื่อนที่เกิดขึ้นจะส่งผลต่อระยะที่วัดได้เช่นเดียวกันกับกรณีของค่าคลาดเคลื่อนจากนาฬิกาดาวเทียม เพียงแต่ค่าคลาดเคลื่อนจากนาฬิกาเครื่องรับจะมีขนาดใหญ่กว่าค่าคลาดเคลื่อนจากนาฬิกาดาวเทียมมาก (อาจมากถึงระดับไมโครวินาที ซึ่งเทียบเท่าได้กับการวัดระยะที่ผิดพลาดไปประมาณ 300 เมตร) ดังนั้นค่าคลาดเคลื่อนจากนาฬิกาเครื่องรับจึงถือเป็นค่าคลาดเคลื่อนที่มีขนาดใหญ่ที่สุดสำหรับการหาตำแหน่งจุดเดี่ยว
- ค่าคลาดเคลื่อนจากการแปรเปลี่ยนของจุดศูนย์กลางเฟสของเสาอากาศ
โดยทั่วไปข้อมูลระยะทางที่วัดได้จากสัญญาณจีพีเอสจะเป็นระยะทางที่วัดระหว่างจุดศูนย์กลางอิเล็กทรอนิกส์ของตัวส่งคลื่นสัญญาณในดาวเทียมกับจุดศูนย์กลางอิเล็กทรอนิกส์ของตัวเสาอากาศของเครื่องรับสัญญาณดาวเทียม ในทางอุดมคติจุดศูนย์กลางที่วัดได้ทางกายภาพควรจะเป็นจุดเดียวกันกับจุดศูนย์กลางอิเล็กทรอนิกส์ อย่างไรก็ดีในความเป็นจริงจุดทั้งสองนั้นไม่ใช่จุดเดียวกันและมีค่าต่างระหว่างสองจุดอยู่ และเนื่องจากจุดศูนย์กลางอิเล็กทรอนิกส์จะแปรเปลี่ยนตามทิศทางและความแรงของคลื่นสัญญาณที่เข้ามายังเสาอากาศ การเปลี่ยนเรขาคณิตระหว่างดาวเทียมและเครื่องรับสัญญาณก็จะส่งผลให้ตำแหน่งของจุดศูนย์กลางอิเล็กทรอนิกส์มีการแปรเปลี่ยนไปด้วย ค่าการแปรเปลี่ยนของจุดศูนย์กลางเฟสของเสาอากาศจะมีค่ามากหรือน้อยขึ้นอยู่กับชนิดและคุณภาพของเสาอากาศที่ใช้
- ค่าคลาดเคลื่อนจากสัญญาณรบกวนในเครื่องรับ
ขนาดของค่าคลาดเคลื่อนจากสัญญาณรบกวนในเครื่องรับนั้นขึ้นอยู่กับปัจจัยหลายตัว เช่น อัตราส่วนระหว่างความแรงของสัญญาณกับสัญญาณรบกวน (Signal to noise ratio) และ Tracking bandwidth เป็นต้น เราสามารถใช้กฎหัวแม่มือ (Rule of thumb) ที่กล่าวว่าค่าคลาดเคลื่อนจากสัญญาณรบกวนในเครื่องรับจะมีขนาดประมาณร้อยละ 1 ของความยาวคลื่น ดังนั้นระดับของสัญญาณรบกวนในเครื่องรับจากการวัดซูโดเรนจ์โดยใช้รหัส C/A จะอยู่ที่ประมาณ 3 เมตร (มีความยาวคลื่น ~300 เมตร) ในขณะที่ระดับของสัญญาณรบกวนในเครื่องรับจากการวัดเฟสของคลื่นส่งจะอยู่ที่ประมาณ 2 มิลลิเมตร ทั้งข้อมูลเฟสของคลื่นส่งใน L1 และ L2 (L1 มีความยาวคลื่น ~19 เซนติเมตร และ L2 มีความยาวคลื่น ~24 เซนติเมตร) สำหรับเครื่องรับแบบทั่วไป อย่างไรก็ดีด้วยนวัตกรรมใหม่ที่มาพร้อมกับเครื่องรับสัญญาณรุ่นใหม่ๆ จะพบว่าระดับของสัญญาณรบกวนในเครื่องรับจากการวัดเฟสของคลื่นส่งจะอยู่ที่ระดับที่ต่ำกว่า1 มิลลิเมตร และระดับของสัญญาณรบกวนในเครื่องรับจากการวัดซูโดเรนจ์โดยใช้รหัส C/A จะอยู่ที่ระดับเดซิเมตร (Qiu, 1993; Seeber, 1993)
- ค่าคลาดเคลื่อนจากค่าพิกัดของสถานีฐาน
ค่าคลาดเคลื่อนชนิดนี้เกิดเฉพาะกับวิธีการหาตำแหน่งสัมพัทธ์เท่านั้น เนื่องจากวิธีการหาตำแหน่งสัมพัทธ์จะต้องทราบตำแหน่งสัมบูรณ์อย่างน้อยหนึ่งจุด เพื่อใช้หาตำแหน่งสัมบูรณ์ของจุดอื่นๆ ซึ่งจุดที่ทราบตำแหน่งเรียกกันทั่วไปว่า สถานีฐานในการประมวลผลข้อมูลจีพีเอสเพื่อหาค่าระยะเส้นฐานจะทำการตรึงค่าพิกัดของสถานีฐานไว้ ดังนั้นค่าคลาดเคลื่อนที่เกิดจากการตรึงค่าพิกัดของสถานีฐานส่งผลให้ค่าระยะเส้นฐานที่คำนวณได้ผิดพลาดไปด้วย สำหรับผลของค่าคลาดเคลื่อนจากค่าพิกัดของสถานีฐานต่อการหาตำแหน่งแบบสัมพัทธ์จะขึ้นกับระยะทางระหว่างเครื่องรับทั้งสอง
ค่าคลาดเคลื่อนที่เกี่ยวข้องกับการแพร่กระจายของสัญญาณ
ค่าคลาดเคลื่อนที่ถูกจัดในกลุ่มนี้จะมีการล่าช้าเนื่องมาจากเดินทางของคลื่นผ่านชั้นบรรยากาศ(Atmospheric delay) และค่าคลาดเคลื่อนจากคลื่นหลายวิถี (Multipath error)
- การล่าช้าเนื่องมาจากเดินทางของคลื่นผ่านชั้นบรรยากาศ
เมื่อคลื่นเดินทางจากดาวเทียมมายังเครื่องรับสัญญาณดาวเทียม จึงเกิดการล่าช้าอันเนื่องมาจากการเดินทางของคลื่นผ่านชั้นบรรยากาศ ในทางทฤษฎีเราสมมติว่าคลื่นเดินทางในสุญญากาศโดยมีความเร็วเท่ากับความเร็วแสง แต่ในความเป็นจริงในการเดินทางของคลื่นนั้นไม่ได้ผ่านสุญญากาศโดยตลอด โดยจะต้องมีการเดินทางผ่านชั้นบรรยากาศของโลกหลายๆ ชั้น ซึ่งมีชั้นบรรยากาศอยู่สองชั้นที่มีผลต่อการเดินทางของคลื่น คือ ชั้นไอโอโนสเฟียร์(Ionosphere) และชั้นโทรโพสเฟียร์ (Troposphere)
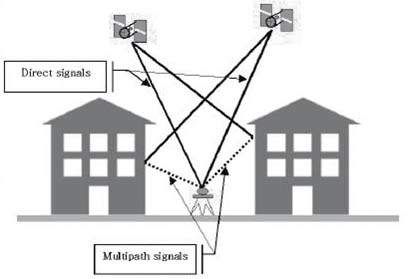
- ค่าคลาดเคลื่อนจากคลื่นหลายวิถี
คลื่นหลายวิถี หมายถึง การแพร่กระจายของคลื่นที่มีการสะท้อนตั้งแต่หนึ่งครั้งขึ้นไป โดยพื้นผิวที่สะท้อนอาจอยู่ในแนวดิ่ง ราบ หรือเอียง เช่น ผนังตึก ถนน ผิวน้ำ หรือยานพาหนะ เป็นต้น ภาพที่ 5.6 แสดงให้เห็นถึงแนวทางเดินของสัญญาณจีพีเอสที่เดินทางมาเข้าเครื่องรับโดยตรงและสัญญาณเกิดการสะท้อนกับพื้นผิวรอบข้างก่อนที่จะถึงเครื่องรับซึ่งก็คือคลื่นหลายวิถี
ค่าคลาดเคลื่อนอื่นๆ ในข้อมูลจีพีเอส
ค่าคลาดเคลื่อนในกลุ่มนี้จะเกี่ยวข้องกับการวัดระยะด้วยการวัดเฟสของคลื่นส่งเท่านั้น โดยมีค่าคลาดเคลื่อนที่ถูกจัดอยู่ในกลุ่มนี้คือ ค่าคลาดเคลื่อนจากคลื่นหลุด (Cycle slip) และค่าเลขปริศนา (Ambiguity)
- ค่าคลาดเคลื่อนจากคลื่นหลุด
ค่าคลาดเคลื่อนจากคลื่นหลุดเกิดจากการที่มีสิ่งกีดขวางมาบังเสาอากาศของเครื่องรับสัญญาณหรืออาจเกิดจากการที่มีคลื่นรบกวนขนาดใหญ่ เช่น การเกิดความแปรปรวนขนาดใหญ่ในชั้นบรรยากาศไอโอโนสเฟียร์เป็นต้น จึงทำให้ไม่สามารถรับสัญญาณดาวเทียมต่อเนื่องได้ ผลจากการเกิดคลื่นหลุดจะทำให้ค่าเลขปริศนาของคลื่นส่งเปลี่ยนไปจากเดิม โดยทั่วไปการตรวจหาและซ่อมแซมคลื่นหลุดจะทำในขั้นตอนของการประมวลผลข้อมูลเบื้องต้น
- ค่าเลขปริศนา
ในการหาระยะที่ละเอียดถูกต้องสูงจากการวัดระยะด้วยการวัดเฟสของคลื่นส่ง นั้นจำเป็นอย่างยิ่งที่จะหาค่าเลขปริศนา (N) ซึ่งในทางทฤษฎีค่าเลขปริศนาจะต้องเป็นเลขจำนวนเต็ม มีค่าต่างกันในข้อมูลเฟสของคลื่นส่ง L1 และ L2 และยังมีค่าต่างกันสำหรับคู่ดาวเทียมและเครื่องรับแต่ละคู่ (Each satellite-receiver pair) ค่าเลขปริศนาแต่ละค่าจะเป็นค่าคงที่ตราบใดที่มีการรับสัญญาณอย่างต่อเนื่องและไม่เกิดคลื่นหลุด การหาค่าเลขปริศนาจะทำในขั้นตอนของการประมวลผลข้อมูล (หลังจากที่ได้ขจัดค่าคลาดเคลื่อนต่างๆและซ่อมแซมคลื่นหลุดในข้อมูลแล้ว) ซึ่งขั้นตอนของการหาค่าเลขปริศนาจะเรียกกันโดยทั่วไปว่า การแยกความกำกวม (Ambiguity Resolution : AR)
ที่มา : ตำราเทคโนโลยีอวกาศและภูมิสารสนเทศศาสตร์