โพสต์นี้ผมต้องการแสดงวิธีการจำ การแปลงพิกัดระหว่าง MGRS เป็น UTM หรือ UTM เป็น MGRS ในแบบวิธีของผมนะครับ ซึ่งผมอาจจะอธิบายอาจจะไม่ได้ละเอียดตั้งแต่ต้น ที่มาหลายๆ อย่างอย่างเช่นพวกค่ากริดโซน ซึ่งผมคิดว่าน่าจะเข้าใจกันอยู่แล้ว สมมติเราได้ค่า MGRS มาค่านึงเช่น 47PML370329 ก่อนอื่นต้องแยกตัวเลขที่ประกอบเป็นชุดนี้ก่อน แยกได้เป็น 47 P M L 370 329 เอาเป็นว่าผมไม่อธิบายที่มา ของ ตัวเลข 47 P ว่ามายังไงนะครับ ผมอยากเน้นเรื่องการแปลงค่าพิกัดทางทหาร MGRS เป็นพิกัดแบบ UTM มากกว่า ตัวที่เราสนใจ คือค่า ML370329 โดยถ้าตัวเลขที่ตามมามีผลต่อเรื่องความแม่นยำเชิงตำแหน่ง …..ถ้าระบุ 47P เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วง 6 องศา x 8 องศา (longitude 96-102 ตะวันออก และ latitude 8-16 เหนือ) 47PML เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วงจัตุรัสแสนเมตร หรือ 100 กิโลเมตร 47PML3 3 เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วงจัตุรัสหมื่นเมตร หรือ 10 กิโลเมตร 47PML37 32 เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วงจัตุรัสพันเมตร หรือ 1 กิโลเมตร 47PML370329 เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วงจัตุรัส 100 เมตร ถ้าอยากจะให้เราถึงระดับ 10 เมตรต้องทำไง ก็เพิ่มตัวเลขเข้าไปอีกหลักนึง คือ 47PML3705 3295 เราก็จะรู้ว่า ความแม่นยำอยู่ในช่วงจัตุรัส 10 เมตร ถ้าอยากให้รู้ถึงระดับ 1 เมตรก็เพิ่มอีก 1 หลัก เป็น 47PML 37056 32957 นอกเรื่องไปแล้ว ย้อนกลับมาถึง ML370329 ต่อ เราจะหาค่า ML ยังไงถ้าไม่ต้องใช้ Software และ เปิดตาราง ผมใช้วิธีการจำแบบมีหลักการ ดังนี้ ML ให้แยกเป็น M และ L นะครับ M ตัวแรก คือ ในจัตุรัสแสนเมตร ทุกๆ 3 โซนตัวอักษรจะซ้ำกัน และตัวอักษณที่ใช้จะใช้ตั้งแต่ A-Z ยกเว้น I และ O จะมีตัวอักษรให้ใช้ 24 ตัว เท่ากับโซนละ 8 ตัว 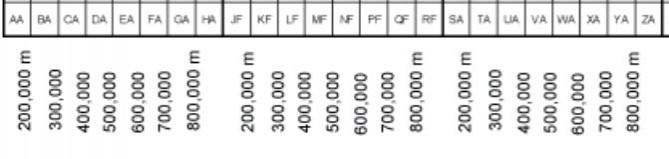 ดังรูปนะครับดังนั้น ค่าพิกัด UTM เมื่อเทียบกับ ตัว M เท่ากับเท่าไหร่ (ค่าในแนวทางตะวันออก-ตะวันออก) ให้เอา โซน 47 หารด้วย 3 นะครับ เหลือเศษ 2 ก็นับไป โดย ตัว A จะเริ่มจาก 100,000 กว่าๆ ของโซน 46 นับไปเรื่อย B คือ 200,000 กว่า นับไปเรื่อยจนตกที่ H 800,000 กว่า ก็เริ่มนับตัวเลขใหม่เป็น I ไม่ใช้ตัดไป เริ่มที่ J 100,000 K 200,000 จนถึง M คือ 400,000 ตอนนี้เราก็ได้ตัวเลขมาแล้ว 1 ตัว M คือ 4 นำมาแทนในค่า MGRS 47PML370329 > UTM 47P 4370XX L329XX ต่อมาตัวที่ต้องหาต่อคือ L (ค่าแนวเหนือ-ใต้) โดย ตัวอักษรที่นำมาใช้คือ A-V ยกเว้น I กับ O ทำให้มีอักษรใช้ 20 ตัว ดังนั้นจะมีตัวอักษรซ้ำทุกๆ ช่วง 2,000,000 เมตร
ดังรูปนะครับดังนั้น ค่าพิกัด UTM เมื่อเทียบกับ ตัว M เท่ากับเท่าไหร่ (ค่าในแนวทางตะวันออก-ตะวันออก) ให้เอา โซน 47 หารด้วย 3 นะครับ เหลือเศษ 2 ก็นับไป โดย ตัว A จะเริ่มจาก 100,000 กว่าๆ ของโซน 46 นับไปเรื่อย B คือ 200,000 กว่า นับไปเรื่อยจนตกที่ H 800,000 กว่า ก็เริ่มนับตัวเลขใหม่เป็น I ไม่ใช้ตัดไป เริ่มที่ J 100,000 K 200,000 จนถึง M คือ 400,000 ตอนนี้เราก็ได้ตัวเลขมาแล้ว 1 ตัว M คือ 4 นำมาแทนในค่า MGRS 47PML370329 > UTM 47P 4370XX L329XX ต่อมาตัวที่ต้องหาต่อคือ L (ค่าแนวเหนือ-ใต้) โดย ตัวอักษรที่นำมาใช้คือ A-V ยกเว้น I กับ O ทำให้มีอักษรใช้ 20 ตัว ดังนั้นจะมีตัวอักษรซ้ำทุกๆ ช่วง 2,000,000 เมตร 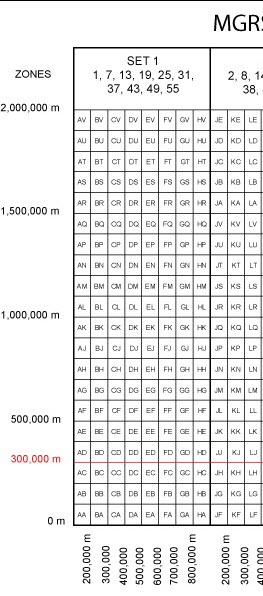 จริงๆ แล้ว มีตารางที่เป็นแบบเต็มนะครับแต่ผมไม่ใส่มาทั้งหมด อยากให้ใช้ดูประกอบวิธีการจำเท่านั้น วิธีการหาค่า L นะครับ ให้ดูตัวเลขโซนนะครับ โดยเริ่มจากเส้นศูนย์สูตรเป็น 0 เมตร นะครับ ถ้าโซนเลขคี่ตัวอักษรจะเริ่มจาก A ขึ้นไปจนถึง V แต่ถ้าเป็นโซนเลขคู่ตัวอักษรจะเริ่มจาก F ขึ้นไป ของเรา 47 เป็นเลขคี่แสดงว่าเริ่มนับตั้วแต่ A ขึ้นไป แสดงว่า A อยู่ในช่วง 0-100,000 เมตร B = 100,000 – 200,000 L ก็จะตกในช่วง 1,000,000 – 1,100,000 (ผมจะใช้วิธีการนับนิ้ว A เท่ากับ 1 , B = 2 …จนถึง L = 11 เสร็จแล้วนำมา ลบ 1 เหลือ 10 ก็คือ 1,000,000 กว่าๆ ไม่ถึง 1,100,000 ตอนนี้เราก็ได้ตัวเลขทั้งหมดแล้วคือ MGRS 47PML370329 >> UTM 47P 4370XX 10329XX ส่วนตัวเลขสองตัวสุดท้ายจะใช้ค่ากึ่งกลางของกริดแทนคือ 50 จะได้เป็น UTM 47P 437050 1032950 ซึ่งผมลองดูใน app ดูก็ใช้จุดกึ่งกลาง คือ UTM 47P 437050 1032950 ปล. เฉพาะซีกโลกเหนือนะครับ ที่มา : geo2ass.wordpress.com
จริงๆ แล้ว มีตารางที่เป็นแบบเต็มนะครับแต่ผมไม่ใส่มาทั้งหมด อยากให้ใช้ดูประกอบวิธีการจำเท่านั้น วิธีการหาค่า L นะครับ ให้ดูตัวเลขโซนนะครับ โดยเริ่มจากเส้นศูนย์สูตรเป็น 0 เมตร นะครับ ถ้าโซนเลขคี่ตัวอักษรจะเริ่มจาก A ขึ้นไปจนถึง V แต่ถ้าเป็นโซนเลขคู่ตัวอักษรจะเริ่มจาก F ขึ้นไป ของเรา 47 เป็นเลขคี่แสดงว่าเริ่มนับตั้วแต่ A ขึ้นไป แสดงว่า A อยู่ในช่วง 0-100,000 เมตร B = 100,000 – 200,000 L ก็จะตกในช่วง 1,000,000 – 1,100,000 (ผมจะใช้วิธีการนับนิ้ว A เท่ากับ 1 , B = 2 …จนถึง L = 11 เสร็จแล้วนำมา ลบ 1 เหลือ 10 ก็คือ 1,000,000 กว่าๆ ไม่ถึง 1,100,000 ตอนนี้เราก็ได้ตัวเลขทั้งหมดแล้วคือ MGRS 47PML370329 >> UTM 47P 4370XX 10329XX ส่วนตัวเลขสองตัวสุดท้ายจะใช้ค่ากึ่งกลางของกริดแทนคือ 50 จะได้เป็น UTM 47P 437050 1032950 ซึ่งผมลองดูใน app ดูก็ใช้จุดกึ่งกลาง คือ UTM 47P 437050 1032950 ปล. เฉพาะซีกโลกเหนือนะครับ ที่มา : geo2ass.wordpress.com
ย้อนกลับไปที่ Standard version 1990 ที่วางแนวทางในการตรวจสอบความถูกต้องเชิงตำแหน่งสำหรับการทำแผนที่มาตราส่วนใหญ่ เพียงอย่างเดียว แต่ ใน version ใหม่นี้ได้ปรับปรุงในหลายส่วนเพิ่มเติม เพื่อนำมาใช้แทน Version 1990 เช่น ข้อมูลการทำ Aerial Triangulation and INS-bases Sensor (Inertial Navigation System-bases), Accuracy ของ Ground Control Point ที่ใช้สำหรับ การทำ AT, Accuracy ของ Lidar และ IFSAR (Interferometric synthetic aperture radar) (ใน ASPRS 1990 ไม่ได้พูดถึงข้อมูล Lidar แต่มี ASPRS Guidelines, Vertical Accuracy Reporting for Lidar Data (2004) ซึ่งนำมารวมใน Version นี้ด้วย
ผมจะเขียนเฉพาะเรื่องความถูกต้องเชิงตำแหน่งทางราบที่เปลี่ยนแปลงไปนะครับ ส่วนอื่นๆ ที่เห็นว่าเป็นประโยชน์ ผมจะนำมาเขียนแยกเป็นส่วนๆ ไป เพื่อไม่ให้เนื้อหามันกระจัดกระจายเกินไปอันดับแรกต้องเขียนถึง checkpoint ที่เปลี่ยนไปโดยจะมีเรื่องขนาดพื้นที่ของงานเข้ามาเกี่ยวข้องด้วย
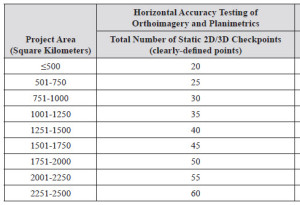
โดยในขนาดพื้นที่เริ่มต้นที่ น้อยกว่า 500 ตร.กม. จะใช้ Checkpoint อย่างต่ำที่ 20 จุด และทุกๆ ขนาดพื้นที่ที่เพิ่มขึ้นทุกๆ 250 ตร.กม. จะใช้ checkpoint เพิ่มขึ้น 5 จุด โดยการกระจายจะใช้วิธีการเช่นเดิมคือ ระยะห่างแต่ละจุดประมาณ 1 ใน 10 ของ เส้นทะแยงมุมของภาพ และ มีจุดอยู่ อย่างน้อย 20{8645ed30ebfee2716765f004cf3f74a8c4ef5e59d5d4d4ef1cf40763c4bdb1fe} ในแต่ละ quadrant รวมถึงการกระจายของจุดนี้ให้คำนึงถึงลักษณะของประเภทสิ่งปกคลุมดิน ด้วย โดยให้หนาแน่นบริเวณพื้นที่ที่สำคัญ และ ประปรายในบริเวณที่ไม่สำคัญ ส่วนวิธีการคำนวณก็เช่นเดียวกับ version 1990 (หาอ่านย้อนของเก่าได้)
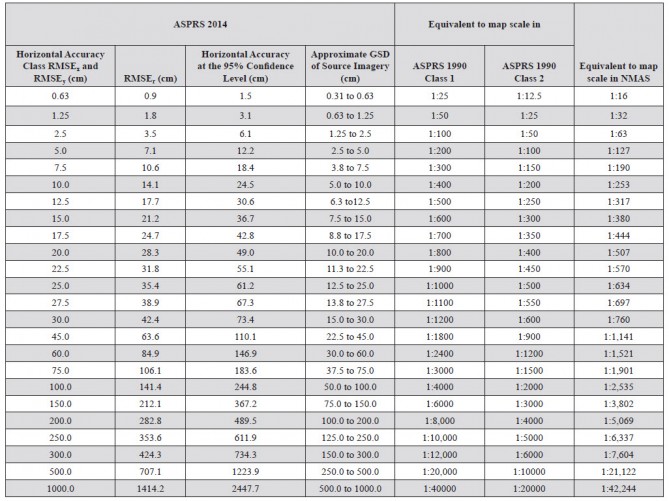
การจะบอกความแม่นยำใช้การเรียกตามคลาสความถูกต้องของชั้นข้อมูลที่ผลิตได้

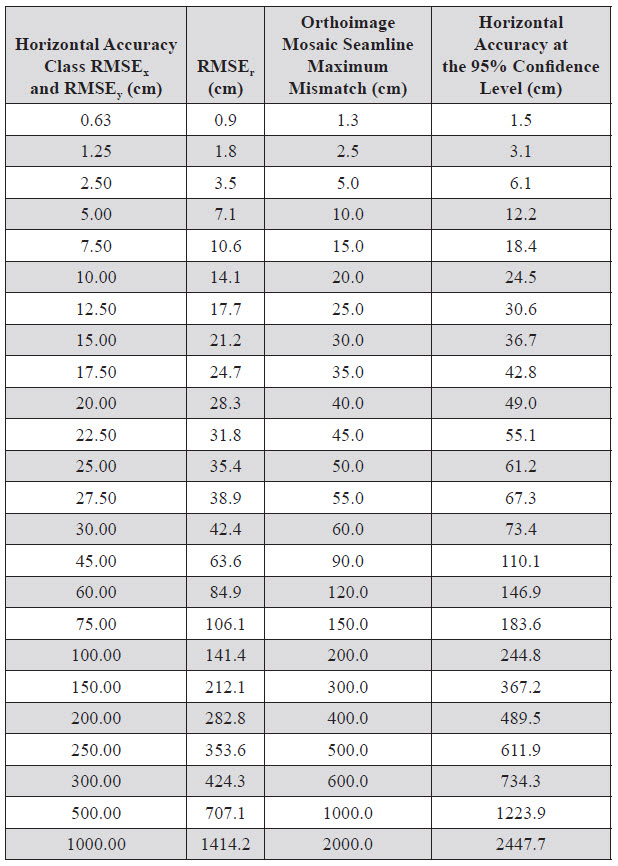
แตกต่างจากของเดิมที่เรียกตามแบบ map scale และ class 1, class 2 ตามรูป
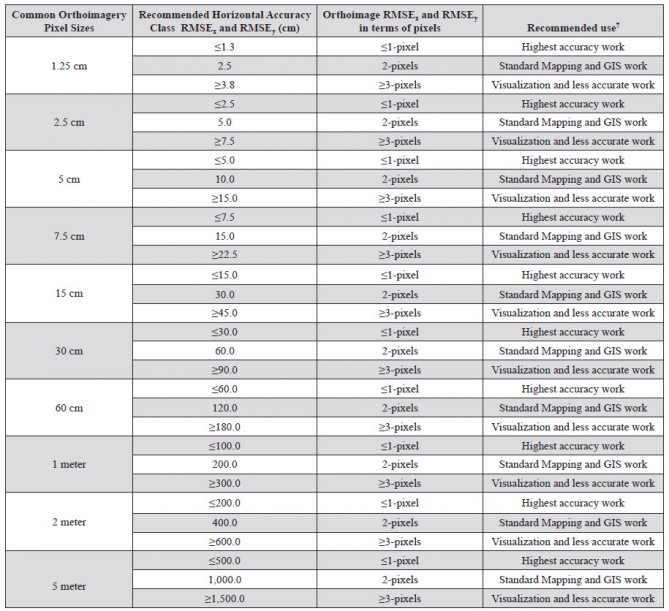
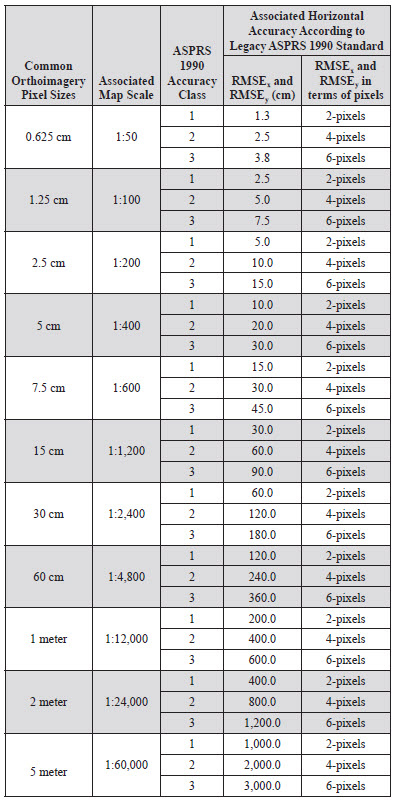
ส่วนในการผลิตภาพ Ortho ได้กำหนด ค่า RMSEx และ RMSEy ที่เหมาะสมในการผลิตภาพ Ortho ที่ pixel sizes เท่าไหร่ รวมถึงนำไปใช้ทำอะไรไว้ด้วย
เปรียบเทียบกับของปี 1990
โพสต์นี้ไม่มีเรื่องคำนวณเข้ามาเกี่ยวข้องเท่าไหร่ เนื่องจากวิธีการคำนวณก็ใช้วิธีการแบบปี 1990
ที่มา : geo2ass.wordpress.com